
מציאת ערכים ווקטורים עצמיים של מטריצה עם ובלי פייתון
וקטורים וערכים עצמיים מאפשרים לנו לאפיין מטריצות ולצמצם נתונים מורכבים למרכיבים חיוניים מה שעוזר בניתוח של מערכות נתונים מורכבות. במדריך זה נראה כיצד לחשב אותם בלי להשתמש בקוד עבור מערכת פשוטה וכיצד להשתמש בספריית Numpy של פייתון לפתרון מטריצות בכל רמה של מורכבות.
מציאת וקטורים וערכים עצמיים ללא קוד
נמצא את הערכים העצמיים והוקטורים העצמיים (eigenvalues and eigenvectors) של מטריצה שממדיה 2 X 2:
$$ A = \begin{bmatrix} 1 & 0.5 \\ 0.5 & 1 \end{bmatrix} $$
1. מציאת ערכים עצמיים
לוקטור ריבועי ייתכן וקיים צמד של וקטור וסקלר אשר מקיימים:
$$ A v = \lambda v $$
נסדר מחדש:
$$ A v - \lambda v = 0 $$
כיוון שכפל ב-I, מטריצת הזהות, כמוהו ככפל ב-1, אנו יכולים לעשות את הדבר הבא שיעזור לנו בפיתוח המשוואה האופיינית:
$$ A v - \lambda I v = 0 $$
נוציא את הוקטור v מחוץ לסוגריים:
$$ (A - \lambda I) v = 0 $$
בשלב זה, יש לנו שתי אפשרויות או שהוקטור שווה ל-0:
$$ v = 0 $$
או שהמטריצה שווה ל-0:
$$ (A - \lambda I) = 0 $$
אבל הוקטור חייב להיות שונה מ-0 (v ≠ 0) כיוון שאנחנו לא מעוניינים בפתרונות טריוויאליים.
אם המטריצה הייתה הופכית אז ניתן היה לכפול את שני האגפים בהופכי:
$$ (A - \lambda I)^{-1} (A - \lambda I) v = (A - \lambda I)^{-1} 0 $$
כדי לקבל:
$$ I v = 0 $$
כיוון שכפל במטריצת הזהות לא משנה את המטריצה, נקבל ש:
$$ v = 0 $$
קיבלנו סתירה כיוון שהוקטור v לא יכול להיות גם שווה ל-0 וגם שונה ממנו. מה שאומר שלמטריצה לא יכול להיות הופכי.
אם למטריצה אין הופכי אז הדטרמיננטה שלה בהגדרה שווה ל-0:
$$ det(A - \lambda I) = 0 $$
-
משוואה זו נקראת המשוואה האופיינית characteristic equation או הפולינום האופייני.
מוצאים את הערכים העצמיים באמצעות פתרון המשוואה האופיינית.
$$ det( \begin{bmatrix} 1 & 0.5 \\ 0.5 & 1 \end{bmatrix} - \lambda \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix}) = 0 $$
$$ det( \begin{bmatrix} 1 & 0.5 \\ 0.5 & 1 \end{bmatrix} - \begin{bmatrix} \lambda & 0 \\ 0 & \lambda \end{bmatrix}) = 0 $$
$$ det( \begin{bmatrix} 1-\lambda & 0.5 \\ 0.5 & 1-\lambda \end{bmatrix} ) = 0 $$
נשתמש באלגוריתם לפתרון דטרמיננטה של 2X2 כדי להפיק משוואה אופיינית:
$$ \lambda^2 - 2\lambda + 0.75 = 0 $$
נפתור את המשוואה כדי לקבל את הערכים העצמיים:
$$ \lambda_{1,2} = \frac{-b \pm \sqrt{b^2 - 4ac}}{2a} $$
$$ \lambda_{1,2} = \frac{2 \pm \sqrt{4 - 3}}{2} $$
הצבה ופתרון המשוואה נותנת את הערכים העצמיים:
$$ \lambda_1 = 1.5 \\ \lambda_2 = 0.5 $$
2. מציאת וקטורים עצמיים
את הווקטורים העצמיים נמצא על ידי הצבת ערכי הערכים העצמיים חזרה לתוך המשוואה האופיינית:
$$ (A - \lambda I) v = 0 $$
$$ E_{1.5} = \begin{bmatrix} 1-1.5 & 0.5 \\ 0.5 & 1-1.5 \end{bmatrix} \begin{bmatrix} x_{1} \\ x_{2} \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix} $$
כיוון ששתי השורות נותנות את אותה התוצאה אפשר להשתמש רק באחת מהם בשביל הפתרון. נבחר בעליונה.
נכפול את המטריצות, ונסדר את התוצאה:
$$ x_{1} = x_{2} $$
מה שאומר שהוקטור העצמי הוא משפחה של פתרונות שבו האיברים הראשון והשני שווים. כך נציין את זה:
$$ E_{1.5} = span( \begin{bmatrix} 1 \\ 1 \end{bmatrix} ) $$
נמצא את הוקטור העצמי השני באותו האופן, ונקבל:
$$ E_{0.5} = span( \begin{bmatrix} 1 \\ -1 \end{bmatrix} ) $$
3. נוודא את התוצאה אותה חישבנו
נבדוק את התוצאה של הראשון האם מתקיים השיוויון:
$$ A v = \lambda v $$
$$ \begin{bmatrix} 1 & 0.5 \\ 0.5 & 1 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \end{bmatrix} = 1.5 \begin{bmatrix} 1 \\ 1 \end{bmatrix} $$
והשיוויון אכן מתקיים.
את אותה הבדיקה אפשר לעשות כדי לוודא את הקומבינציה של הערך והוקטור העצמי האחרים שקיבלנו.
שימוש בפייתון למציאת ערכים ווקטורים עצמיים של מטריצה
אפשר להשתמש בפייתון למציאת ערכים ווקטורים עצמיים של מטריציה. אפשרות מועילה ביותר ביישומים אמיתיים בהם המכונה צריכה לפתור מטריצות מורכבות כדי לספק תשובה.
לצורך הפתרון נשתמש בספריית Numpy:
import numpy as np
# Matrix formatted as a Numpy array of arrays
A = np.array([[1, 0.5], [0.5, 1]])
# This is where the magic happens
lamdas, V = np.linalg.eig(A)
# Print the typical values
print(lamdas)
# Print the typical vectors
print(V)הערכים העצמיים המחושבים הם:
[1.5 0.5]
הוקטורים העצמיים המחושבים הם:
[[0.70710678 0.70710678] [-0.70710678 0.70710678]]
-
העמודה הראשונה היא משפחת הפתרונות עבור הערך העצמי λ = 1.5 כאשר כל הוקטורים במשפחה מקיימים שויון בין הערך הראשון והשני, משמע:
$$ E = span( \begin{bmatrix} 1 \\ 1 \end{bmatrix} ) $$
-
העמודה השנייה היא משפחת הפתרונות עבור הערך העצמי λ = 0.5 כאשר כל הווקטורים במשפחה מקיימים שהערך השני הוא השלילי של הראשון:
$$ E = span( \begin{bmatrix} 1 \\ -1 \end{bmatrix} ) $$
נוודא:
# Let's confirm
# Eigenvectors
v = V[:, 0]
# Eigenvalues
lamda = lamdas[0]
np.dot(A, v) == lamda * v
# print(np.dot(A, v))
# print(lamda * v)התוצאה:
array([ True, True])
- השיוויון אכן מתקיים.
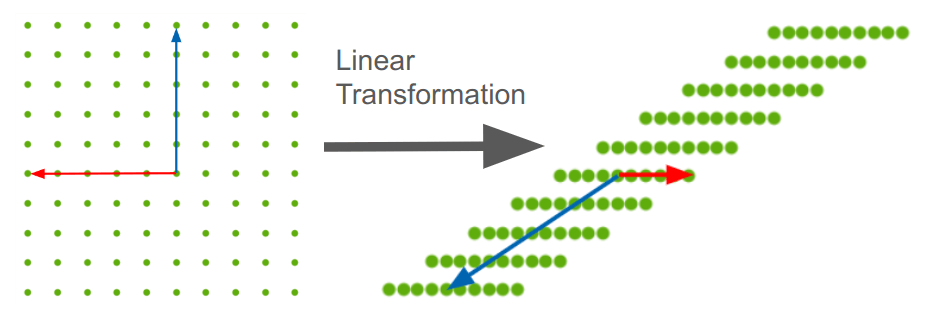
קוד להצגת הטרנספורמציות כולל האייגנים
קוד הפייתון הבא שימש אותי להצגת הלפני ואחרי של הטרנספורמציה כולל גודל וכיוון האייגנוקטורים:
import numpy as np
import matplotlib.pyplot as plt
from numpy.linalg import eig
# Define the coordinates
coords_before = [[1, 0], [0, 1]]
coords_after = [[1,0.5],[0.5,1]]
coords_list = [coords_before, coords_after]
grid_size = 100
def generate_dot_grid_coordinates(grid_size, spacing=6):
"""Generate coordinates for a grid of dots in a given size with specified spacing with the center at [0,0].
Also generates a gradient based on the distance from the center."""
# Calculate half the grid size
half_size = grid_size // 2
# Create x and y ranges
x = np.arange(-half_size, half_size + spacing, spacing)
y = np.arange(-half_size, half_size + spacing, spacing)
# Generate grid coordinate matrices
xv, yv = np.meshgrid(x, y)
# Flatten and stack the coordinates
coords = np.vstack([xv.ravel(), yv.ravel()])
# Create the gradient based on the x and y coordinates
gradient_x = (coords[0] - np.min(coords[0])) / (np.max(coords[0]) - np.min(coords[0]))
gradient_y = (coords[1] - np.min(coords[1])) / (np.max(coords[1]) - np.min(coords[1]))
# Combine the gradients
gradient = (gradient_x + gradient_y) / 2
return coords, gradient
def plot_vectors(vectors, colors):
plt.axvline(x=0, color='lightgray')
plt.axhline(y=0, color='lightgray')
for i in range(len(vectors)):
x = np.concatenate([[0, 0], vectors[i]])
plt.quiver([x[0]], [x[1]], [x[2]], [x[3]],
angles='xy', scale_units='xy', scale=1, color=colors[i])
# Generate grid coordinates and gradient
coords, gradient = generate_dot_grid_coordinates(grid_size)
# Loop through the coordinates and plot eigenvectors
for i, coord in enumerate(coords_list):
# Transform the grid coordinates using the transition matrix `coord`
transformed_coords = np.dot(coord, coords)
# Calculate the limits for the plot
x_min, x_max = np.min(transformed_coords[0]) - 5, np.max(transformed_coords[0]) + 5
y_min, y_max = np.min(transformed_coords[1]) - 5, np.max(transformed_coords[1]) + 5
# Create the plot
plt.figure()
# Plot the transformed grid as background
plt.scatter(transformed_coords[0], transformed_coords[1], c=gradient, cmap='ocean', s=10, alpha=0.6)
# Calculate eigenvalues and eigenvectors
eigenvalues, eigenvectors = eig(coord)
# Plot eigenvectors
scale_factor = grid_size / 2
eigenvector = eigenvectors[:, 0]
magnitude = np.sqrt(np.abs(eigenvalues[0]))
red_vector = [scale_factor * magnitude * eigenvector[0], scale_factor * magnitude * eigenvector[1]]
eigenvector = eigenvectors[:, 1]
magnitude = np.sqrt(np.abs(eigenvalues[1]))
blue_vector = [scale_factor * magnitude * eigenvector[0], scale_factor * magnitude * eigenvector[1]]
plot_vectors([red_vector, blue_vector], ["red", "blue"])
# Print eigenvalues and eigenvectors
print(f"λ1 = {np.round(eigenvalues[0], 2)}")
print(f"λ2 = {np.round(eigenvalues[1], 2)}")
print(f"det(A) = {np.linalg.det(coord)}")
print(eigenvectors[:, 0])
print(eigenvectors[:, 1])
# Set plot limits dynamically
plt.xlim(x_min, x_max)
plt.ylim(y_min, y_max)
plt.show()התוצאה:
* הקוד עובד כל עוד התוצאה היא מספרים אמיתיים.
- אפשר לראות שהטנספורמציה מכווצת את הוקטור העצמי האדום לכדי חצי (0.5) מהאורך המקורי ומאריכה את הוקטור העצמי הכחול פי 1.5; סה"כ הטרנספורמציה מכווצת את השטח ל-75% מהמקור כפי שאפשר ללמוד מחישוב הדטרמיננטה: det(A) = 0.75 .
למדריכים נוספים בסדרה על למידת מכונה
12 דברים שאתה חייב לדעת כשאתה עובד עם ספריית Numpy של Python
למידת מכונה בלתי מפוקחת באמצעות PCA
מציאת יחס הזהב בתוך סדרת מספרים עולה באמצעות (קצת) אלגברה לינארית
לכל המדריכים בנושא של למידת מכונה
אהבתם? לא אהבתם? דרגו!
0 הצבעות, ממוצע 0 מתוך 5 כוכבים

המדריכים באתר עוסקים בנושאי תכנות ופיתוח אישי. הקוד שמוצג משמש להדגמה ולצרכי לימוד. התוכן והקוד המוצגים באתר נבדקו בקפידה ונמצאו תקינים. אבל ייתכן ששימוש במערכות שונות, דוגמת דפדפן או מערכת הפעלה שונה ולאור השינויים הטכנולוגיים התכופים בעולם שבו אנו חיים יגרום לתוצאות שונות מהמצופה. בכל מקרה, אין בעל האתר נושא באחריות לכל שיבוש או שימוש לא אחראי בתכנים הלימודיים באתר.
למרות האמור לעיל, ומתוך רצון טוב, אם נתקלת בקשיים ביישום הקוד באתר מפאת מה שנראה לך כשגיאה או כחוסר עקביות נא להשאיר תגובה עם פירוט הבעיה באזור התגובות בתחתית המדריכים. זה יכול לעזור למשתמשים אחרים שנתקלו באותה בעיה ואם אני רואה שהבעיה עקרונית אני עשוי לערוך התאמה במדריך או להסיר אותו כדי להימנע מהטעיית הציבור.
שימו לב! הסקריפטים במדריכים מיועדים למטרות לימוד בלבד. כשאתם עובדים על הפרויקטים שלכם אתם צריכים להשתמש בספריות וסביבות פיתוח מוכחות, מהירות ובטוחות.
המשתמש באתר צריך להיות מודע לכך שאם וכאשר הוא מפתח קוד בשביל פרויקט הוא חייב לשים לב ולהשתמש בסביבת הפיתוח המתאימה ביותר, הבטוחה ביותר, היעילה ביותר וכמובן שהוא צריך לבדוק את הקוד בהיבטים של יעילות ואבטחה. מי אמר שלהיות מפתח זו עבודה קלה ?
השימוש שלך באתר מהווה ראייה להסכמתך עם הכללים והתקנות שנוסחו בהסכם תנאי השימוש.